
The acquisition and reconstruction of 3D objects is an active area of research. In order to make 3D scanning technology commonly available to the public, it is important to develop techniques with minimal hardware requirement and yet produce high quality surfaces. Flexibility, speed and robustness of the acquisition is also of critical importance.
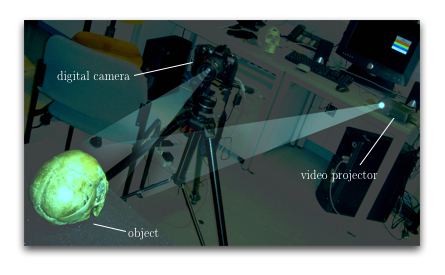 |
| Our scanning system. |
In this project, we present a complete scanning system that only requires a projector and a digital camera. The shape of an object is acquired through optical triangulation using a novel color structured light pattern. A high resolution triangle mesh, which is purged from outliers and noise, is then generated. New methods that make use of additional local spatial continuity assumption are introduced in order to be robust against high frequency occlusions and inappropriate reflections. Only three shots are needed for the reconstruction from each view.
 |
 |
 |
 |
|
 |
| For each view, three shots (left) are required to reconstruct a triangle mesh (right). | ||
In the acquisition process, uniquely encoded stripe boundaries are projected onto the object. The acquired stripe boundaries are detected in the photographs before they are corresponded with the projected ones. This generates a point cloud after optical triangulation between the corresponded data. Our stripe sequences have local and global uniqueness properties of a predefined subsequence length. This makes wrongly corresponded stripe boundaries, that yield outliers, easily detectable for annihilation. In addition, we use the colors located on the medial axes of the acquired stripes for a more reliable correspondence. Although these acquired colors are closer to the projected ones, they are highly susceptible to spatial discontinuities and occlusions. We present a method to overcome this by clustering those medial axes w. r. t. their corresponding stripe boundaries and by considering the median values of the clusters. An interscanline labeling algorithm is used for the clustering. This way, we are able to partly shift the labeling problem between projected and acquired data to a labeling between two acquired data, which is similar to stereo vision correpondence.
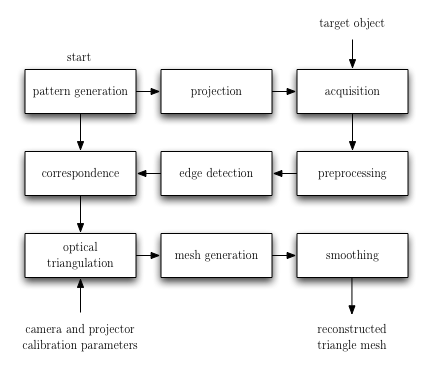 |
| Dataflow of the reconstruction pipeline. |
The reconstruction of the surface is tightly integrated into the reconstruction pipeline. It is therefore possible to exploit crucial a-priori-knowledge of previous stages to generate a topologically consistent triangle mesh, reusing the assumed local space coherence. In contrast to most algorithms that approximate the surface only from an unorganized point cloud, the proposed method is insensitive to irregularly sampled points.
Finally, we have successfully demonstrated the quality of our results on a large variety of objects that contain many occlusions and have poor reflection properties. Advantages (in terms of robustness) over previous works, such as those based on dynamic programming, are experimentally shown.