
Übersicht
Am Institut für Betriebs- und Dialogsysteme wird ein kostengünstiger 3D-Scanner entwickelt, der mit Hilfe eines Projektors und einer Digitalkamera 3D-Objekte rekonstruiert. Beim Scanprozess werden farbige Streifen mit dem Projektor auf das zu scannende Objekt projiziert und mit der Kamera aufgenommen. Aus den aufgenommenen Bildinformationen werden Punkte auf der Oberfläche des Objekts bestimmt und aus diesen ein Dreiecksnetz gebildet. Für diese Berechnung müssen vorher die Positionen der Kamera und des Projektors durch Kalibrieren des 3D-Scanners bestimmt werden. Damit kann eine geometrisch-strahlenoptische Verbindung von Projektorpixel zu Objektpunkt und weiter zum Kamerapixel modelliert werden und aus dem sich ergebenden Dreieck die Koordinaten des einzuscannenden Objektpunkts bestimmt werden.
Zielsetzung dieser Arbeit, ist die Erkennung einzelner Kalibriermarken auf verschiedenen, perspektivisch verzerrten Aufnahmen eines Kalibriermusters. Um die Kalibriermarken zu erkennen, werden zum größten Teil mit Hilfe der Kantendetektion und Eckendetektion die Marken ausfindig gemacht und einander zugeordnet. Die eindeutige Zuordnung der Marken wird anhand von Doppelverhältnissen berechnet.
Ergebnisse
 |
 |
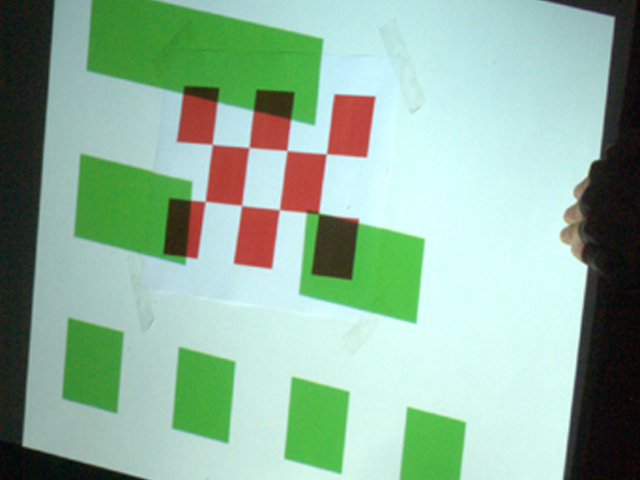
| Kameraufnahme des Kalibrierobjekts: projiziertes (grün) und gedrucktes Bild (rot). |
Kantendetektion nach Canny. |
 |
 |
| Senkrecht (rot) und waagrecht (lila) klassifizierte Hough-Geraden. |
Schnittpunktbestimmung des gedruckten Bilds. |
 |
|
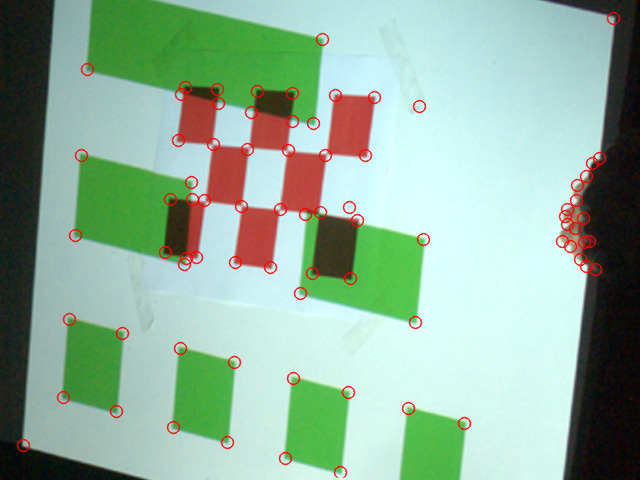
| Eckendetektion nach Harris. | |
 |
 |
| Muster mit bestimmten Doppelverhältnissen. |
Zuordnung der Kalibriermarken. |